
Beckhoff TwinCAT 3 Programlama: Geleneksel PLC'lerden Geçiş Yapan Mühendisler İçin Pratik Bir Kılavuz
Allen Bradley ve Siemens platformlarında on yıl boyunca merdiven mantığı (ladder logic) yazan bir mühendis, TwinCAT 3'ü ilk kez açtığında donakalır. Proje ağacı Visual Studio içinde yer alır. C++ dosyaları PLC koduyla aynı alanı paylaşır. Yapılandırılacak şasi yuvaları, göz atılacak donanım kataloğu yoktur. Gerçek zamanlı çekirdek, web tarayıcınızın yanında bir Windows sürücüsü olarak yüklenir. Bu, Beckhoff TwinCAT 3 programlamasıdır - endüstriyel kontrole yazılım öncelikli bir yaklaşım. Geçiş zorlayıcıdır, ancak karşılığı, geleneksel hiçbir PLC'nin eşleşemeyeceği yeteneklere sahip bir platformdur.
TwinCAT 3 (Windows Kontrol ve Otomasyon Teknolojisi), herhangi bir Windows PC'yi gerçek zamanlı bir PLC ve hareket kontrol cihazına dönüştürür. Çalışma ortamının özel donanım üzerinde bulunduğu geleneksel platformların aksine, TwinCAT 3, gerçek zamanlı bir çekirdek sürücüsü aracılığıyla özel CPU çekirdeklerini Windows'tan izole eder; sanallaştırma değil, doğrudan donanım üzerinde zamanlama yapar.
Mühendislik ortamı TwinCAT 3 XAE, Microsoft Visual Studio'ya bir kabuk uzantısı olarak entegre olur. PLC projesi standart bir .sln çözümü içinde yer alır. Kaynak kontrolü Git üzerinden çalışır. Birden fazla programcı aynı anda çalışabilir. Studio 5000 veya TIA Portal'a alışkın mühendisler için IDE, bir yazılım geliştirme ortamı gibi hissettirir - çünkü gerçekten de öyledir.
Mimari, IEC 61131-3'ün belirlediği sınırların tamamen dışına çıkıyor. C++ ve MATLAB/Simulink modülleri, PLC koduyla birlikte yerel gerçek zamanlı görevler olarak derleniyor ve TcCOM (TwinCAT Bileşen Nesne Modeli) aracılığıyla doğrudan bellek paylaşımı yapıyor. Alan veri yolu, Beckhoff'un binlerce G/Ç terminalini tek bir kablo üzerinde milisaniyenin altında çevrim süreleriyle birbirine bağlayan deterministik protokolü olan EtherCAT'tir. PROFINET cihaz adlandırması yok, GSDML dosyaları yok, üçüncü taraf sürücü yapılandırma araçları yok.
Yazılım yığını: TwinCAT 3 XAE (mühendislik), TwinCAT 3 XAR (çalışma zamanı yürütme) ve gerçek zamanlı çekirdek. Geliştirme ücretsizdir. Sıfır Beckhoff donanımıyla sıradan bir dizüstü bilgisayarda tam makine programları yazabilir, derleyebilir ve simüle edebilirsiniz.
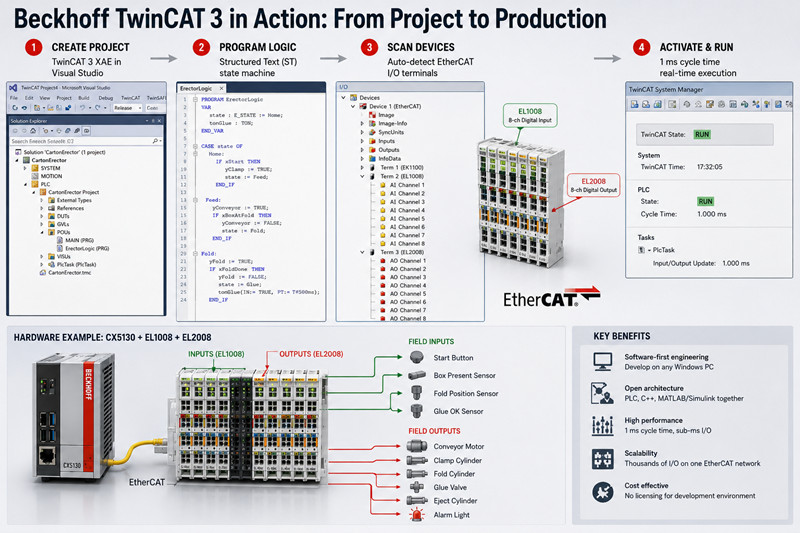
Cidde'de bulunan bir ambalaj entegratörü, CX5130 gömülü bilgisayar, EL1008 8 kanallı dijital girişler ve EL2008 8 kanallı dijital çıkışlar kullanarak bir karton montaj kontrol sistemi kurdu. Kurulumdan devre çıkışına kadar tüm proje bir öğleden sonra tamamlandı.
Adım 1 — TwinCAT 3 XAE'yi yükleyin. Beckhoff'un web sitesinden indirin. Yükleyici, Visual Studio'ya bir TwinCAT araç çubuğu ekler ve gerçek zamanlı çekirdek sürücüsünü kurar. VS 2017, 2019 ve 2022 kabuklarının tümü desteklenmektedir.
Adım 2 — Bir proje oluşturun. Dosya → Yeni → Proje → "TwinCAT Projesi". Çözüm, gerçek zamanlı yapılandırma için bir PLC düğümü, bir SYSTEM düğümü ve EtherCAT cihazları için bir I/O düğümü içerir. CX5130 gibi gömülü PC'ler için x86, daha yeni IPC'ler için x64'ü hedefleyin.
3. Adım — Programlama dilini seçin. PLC düğümüne sağ tıklayın ve bir PLC projesi ekleyin. Beckhoff varsayılan olarak Yapılandırılmış Metin (ST) kullanır ve çoğu programcı ST'ye geçer çünkü ST, dizileri, durum makinelerini ve karmaşık mantığı merdiven mantığından çok daha temiz bir şekilde ele alır. Bununla birlikte, blokları bir tuval üzerine yerleştirdiğiniz ve sinyal telleri çizdiğiniz serbest biçimli bir grafik dili olan Sürekli Fonksiyon Şeması (CFC), proses kontrol döngüleri için benzersiz bir şekilde uygundur. Merdiven Mantığı (LD), bakım ekiplerinin sorun gidermesi gereken ayrık kilitlemeler için kullanılabilir.
Karton birleştirme makinesi için mühendis, ST dilinde Başlangıç, Besleme, Katlama, Yapıştırma ve Çıkarma durumları için bir durum makinesi yazdı. Her durum, EL2008'e çıktı atadı ve EL1008'den girdi okudu.
4. Adım — EtherCAT cihazlarını tarayın. G/Ç ağacında "Cihazlar"a sağ tıklayın ve "Tara"yı seçin. TwinCAT 3, bağlı her terminali, sürücüyü ve G/Ç dilimini otomatik olarak keşfeder. EL1008, 8 kanallı bir giriş terminali olarak görünür. EL2008, 8 kanallı bir çıkış olarak görünür. Terminal kanallarını, değişken bildirimine sürükleyerek PLC değişkenlerine bağlayın.
Adım 5 — Yapılandırmayı etkinleştirin. Araç çubuğunda "Yapılandırmayı Etkinleştir" seçeneğine tıklayın. TwinCAT 3, PLC kodunu derler, gerçek zamanlı yapılandırmayı oluşturur ve her şeyi çalışma ortamına yükler. "Giriş"e basın, "Çalıştırma Modu"nu seçin ve CX5130, yapılandırılmış çevrim süresinde (genellikle 1 ms) PLC mantığını çalıştırır.
Tek sorun şuydu: AMS NetID yönlendirilmediği için dizüstü bilgisayar CX5130'a ulaşamıyordu. Dizüstü bilgisayarın NetID'sini TwinCAT yönlendirici aracı (görev çubuğu simgesi) aracılığıyla eklemek, sorunu iki dakikadan kısa sürede çözdü.
TwinCAT 3'ü geleneksel tüm PLC platformlarından ayıran özellik: yerel C++. Gerçek zamanlı projeye doğrudan bir C++ modülü eklersiniz, gerçek zamanlı uzantılarla standart C++ yazarsınız ve bu, PLC ile aynı yalıtılmış çekirdekte bir TcCOM nesnesi olarak çalışır; sıfır gecikme yüküyle işaretçiler aracılığıyla bellek paylaşımı yapar.
Bir Alman ambalaj üreticisi, bunu OpenCV tabanlı şişe kapağı denetimi için dakikada 400 adetlik bir hızda çalıştırmak amacıyla kullandı. C++ görüntüleme modülü, paylaşımlı bir yapı aracılığıyla PLC durum makinesiyle geçme/kalma sonuçlarını paylaşıyor. Geleneksel bir yaklaşım olan OPC UA üzerinden harici IPC, 10-50 ms gecikme ve bakım gerektiren ekstra bir ağ bağlantısı daha ekleyecektir.
TE1400 hedefi, Simulink modellerini TcCOM modülleri olarak dışa aktarır. Bir proses mühendisi bir PID kademesi tasarlar, "Kod Oluştur" düğmesine tıklar ve model, TwinCAT 3 projesinde gerçek zamanlı bir nesneye derlenir. PLC programcısı, model giriş ve çıkışlarını gerçek I/O terminallerine eşler. Birleşik Arap Emirlikleri'ndeki bir su arıtma tesisi bunu bir pıhtılaşma dozlama algoritması için kullandı - bulanıklık ve pH sensörleri EL3024 analog girişlerine bağlanırken, model çıkışı EL4024 analog çıkışlarını dozlama pompalarına yönlendiriyor. Tam entegrasyon: bir gün.
NC PTP, trapezoidal veya S-eğrisi profilleriyle standart noktadan noktaya konumlandırmayı (konveyörler, doğrusal aktüatörler, döner konumlandırma) gerçekleştirir. TwinCAT CNC, G-kodunu, 5 eksenli kinematikleri, takım yarıçapı telafisini ve ileriye bakmayı destekleyen tam bir sayısal kontrol çekirdeğidir. İtalyan bir CNC atölyesi, TwinCAT CNC üzerinde AX5000 servo sürücülerle 0,1 ms enterpolasyon döngülerinde 5 eksenli işleme yapmaktadır.
TwinCAT HMI (TE2000), Beckhoff IPC'den HTML5/JavaScript panoları sunar. Herhangi bir tarayıcıya sahip cihaz (panel PC, tablet, akıllı telefon) aynı ekranları görüntüler. HMI sunucusu ile PLC arasındaki iletişim, milisaniyenin altında gecikmeyle yerel AMS yönlendiricisi üzerinden ADS kullanılarak gerçekleştirilir. Özel panel donanımına gerek yoktur.
TwinCAT 3, önceliklendirme devre dışı bırakılarak, bireysel görevleri belirli izole çekirdeklere atar. Tipik bir dört çekirdekli CX2040 düzeni: Çekirdek 1, PLC durum makinesini 1 ms'de çalıştırır, Çekirdek 2, NC PTP'yi 0,5 ms'de çalıştırır, Çekirdek 3, bir C++ görüntü işleme modülünü 5 ms'de çalıştırır ve Çekirdek 0, Windows'u yönetir. Herhangi bir gerçek zamanlı görev döngüsünü aşarsa, TwinCAT bir ihlal bildirir ve yapılandırılabilir bir hata durumuna girer. Yüksek hızlı paketleme veya CNC interpolatörleri için, manuel çekirdek izolasyonu, makineyi dengesizleştirecek titreşimi ortadan kaldırır.
TwinCAT 3 lisansları, hedef cihaz başına tek seferlik satın alımlardır. TC1200 (yalnızca PLC, IEC 61131-3), bir CX5130 için yaklaşık 700 dolardır. TC1250, NC PTP hareketini ekler. TC1300, C++'ı etkinleştirir. CX2040'taki tam paket 3.000-4.000 dolar civarındadır. Mühendislik ortamı, geliştirme ve simülasyon için ücretsizdir.
Gömülü PC'ler: CX7000 (~400$ giriş seviyesi), CX2000 serisi (1.500$-4.000$), C6030 ultra kompakt IPC (2.000$+). EL1008 ve EL2008 gibi G/Ç terminalleri modül başına 80$-120$ arasındadır. Standart katalog teslim süreleri 1-3 haftadır.
tztechio.com adresinden Beckhoff gömülü PC'leri, EtherCAT terminallerini ve lisanslama ve PLC çözümlerini inceleyin.
S: TwinCAT 3'ü geliştirme amacıyla normal bir dizüstü bilgisayarda çalıştırabilir miyim?
Evet. TwinCAT 3 XAE, herhangi bir Windows 10/11 x64 makineye kurulabilir. Gerçek zamanlı çekirdek, izole edilmiş CPU zamanlaması kullanarak yerel modda çalışır. Beckhoff donanımına ihtiyaç duymadan tam PLC, C++ ve hareket programları yazabilir, derleyebilir ve simüle edebilirsiniz. G/Ç simülasyonu için, sensör geri bildirimi üreten kısa bir ST rutini yazın. Hareket için, SYSTEM yapılandırmasında eksen simülasyon modunu etkinleştirin.
S: TwinCAT 3'ü öğrenmek, Studio 5000 veya TIA Portal'dan daha mı zor?
Visual Studio ortamı, yalnızca özel PLC IDE'leri kullandıysanız öğrenme eğrisini artırır. Ancak G/Ç tarama iş akışı, TIA Portal'ın donanım kataloğundan daha basittir ve yapılandırılmış metin ve temel yazılım uygulamalarına (sürüm kontrolü, hata ayıklama, değişken kapsamı) aşina olan mühendisler genellikle TwinCAT 3'ü ilk hafta içinde sezgisel bulurlar. Beckhoff'un F1 yardımı kapsamlı ve bağlam odaklıdır.
S: Beckhoff IPC'ye mi ihtiyacım var, yoksa üçüncü parti bir bilgisayar kullanabilir miyim?
Çalışma ortamı herhangi bir x86 Windows PC'de çalışır, ancak Beckhoff gerçek zamanlı davranışı yalnızca kendi donanımında doğrular. Üçüncü taraf PC'lerde yonga seti, BIOS güç yönetimi veya sürücü sorunlarından kaynaklanan titreşim riski vardır. Herhangi bir dizüstü bilgisayarda geliştirme ve simülasyon yapın. Üretim için Beckhoff IPC'lerini kullanın; maliyet farkı, doğrulanmamış donanımda hata ayıklamaya kıyasla ihmal edilebilir düzeydedir.
S: Aynı projede merdiven mantığı (ladder logic) ve yapılandırılmış metni (structed text) birlikte kullanabilir miyim?
Evet. Tek bir PLC projesi, ST, LD, FBD ve CFC'nin herhangi bir kombinasyonunda PRG'ler, FB'ler ve FC'ler içerebilir. Bir merdiven rutini, bir ST fonksiyon bloğunu çağırabilir. Bir CFC diyagramı, merdiven ağlarına referans verebilir. Derleme ve bağlama dilden bağımsızdır.
S: TwinCAT 3, Endüstri 4.0 için OPC UA ve MQTT'yi destekliyor mu?
Evet. TF6100, PLC sembollerini yapılandırılabilir düğümler olarak sunan OPC UA sunucu işlevselliği sağlar. TF6701 ise MQTT yayınlama/abone olma özelliğini ekler. Her ikisi de Windows hizmetlerinden bağımsız olarak, gerçek zamanlı tarafta TcCOM modülleri olarak çalışır.
S: Çalışır durumdaki bir makinede donanım yazılımı ve yazılım güncellemeleri nasıl gerçekleştirilir?
TwinCAT 3, çevrimiçi değişiklikleri destekler; PLC kodunu değiştirebilir, değişkenler ekleyebilir, görev yapılandırmasını çalışma zamanı "Çalışma" modunda kalırken ayarlayabilirsiniz. Yapısal değişiklikler (yeni EtherCAT cihazları, çevrim süresi değişiklikleri, C++ modülleri) kısa ve kontrollü bir yeniden başlatma ile "Yapılandırmayı Etkinleştir" gerektirir. 7/24 süreçler için, otomatik arıza durumunda devralma özelliğine sahip yedekli TwinCAT yapılandırmaları mevcuttur.

Lütfen okumaya devam edin, gelişmelerden haberdar olun, abone olun ve düşüncelerinizi bize bildirmenizi bekliyoruz.



Ayrıca, izninizle, ziyaretinizi slOC ile daha kişisel bir etkileşim haline getirmek için çerezler yerleştirmek istiyoruz. Bunun için analitik ve reklam çerezleri kullanıyoruz. Bu çerezler sayesinde biz ve üçüncü taraflar, super-instrument.com içindeki ve dışındaki internet davranışınızı takip edebilir ve toplayabiliriz. Bununla biz ve üçüncü taraflar super-instrument.com'u ve reklamları ilginize göre uyarlıyoruz. Kabul Et'i tıklatarak bunu kabul etmiş olursunuz. Reddederseniz yalnızca gerekli çerezleri kullanırız ve ne yazık ki herhangi bir kişiselleştirilmiş içerik almayacaksınız. Daha fazla bilgi edinmek veya gelecekte onayınızı değiştirmek için lütfen Çerez politikamızı ziyaret edin.
Accept and continue Decline cookies












